







지난 10월 17일, 중국 후난성 류양시에서 세계 신기록을 세운 드론쇼가 열렸어요.
무려 1만 5,947대의 드론이 하늘을 수놓으며 장관을 연출했죠.
이렇게 완벽한 군집 비행을 구현하려면 높은 수준의 기술이 필요합니다.
현재 이 정도 규모의 쇼를 해낼 수 있는 나라는 전 세계에서도 손에 꼽히죠.
이번 글에서는 드론 군집 기술이 무엇인지, 또 왜 그렇게 어려운지 함께 알아보겠습니다.

드론 군집 기술이란
드론 '군집 기술(Swarm technology)'은 여러 대의 드론이 마치 새떼가 움직이듯 임무를 수행하는 기술을 말해요.
여러 대의 드론이 하나의 컴퓨터 또는 통신 네트워크로 연결되어, 서로 부딪히지 않도록 미리 정해진 경로나 상황에 따라 실시간으로 비행 경로를 조정해요.
조명이 달린 드론들이 밤하늘에 오륜기 모양이나 거대한 꽃 모양을 띠며 비행하는 것도 군집 기술의 하나죠.
이 군집 기술은 여러 드론 기술 중에서도 가장 복잡한 영역이에요.
군집 드론은 정밀 위치 인식, 통신·제어, 경로 계획 및 동기화 등이 필요하며, 단일 드론 비행보다 훨씬 더 많은 요소가 동시에 맞물려야 작동한답니다.
왜 어렵고 까다롭나?
군집 기술이 “화려하다”는 건 알겠지만, 왜 연구·개발이 쉽지 않을까요?
여러 가지 이유가 있습니다. 주요 난관들을 항목별로 나누어 설명드릴게요.

1. 정밀 위치 인식 및 제어
다수의 드론이 같은 공간에서 비행할 때는 각 드론의 위치·속도·방향을 정밀하게 알고 있어야 충돌이 없고 예측이 가능해요.
일반 GPS는 오차가 커서 군집 비행에는 한계가 있고, 이 때문에 흔히 RTK GPS(실시간 운동 동역학 보정 GPS) 같은 보정기술이 활용됩니다.
위치 인식이 부정확하면 드론 간 간격 유지가 어렵고, 작은 오차가 쌓이면 충돌이나 비행 실패로 이어질 수 있습니다.
2. 통신 및 제어 구조
여러 대가 동시에 움직이려면 드론끼리 서로 통신하고 제어 컴퓨터나 지상 관제소와도 원활하게 통신해야 합니다.
통신이 지연되거나 끊기면 각 드론이 올바른 판단을 못 하고 군집 전체의 움직임이 흐트러질 수 있어요.
또한 중앙집중식인가, 분산 제어인가 등의 구조 선택도 기술 난이도에 영향을 미칩니다.
3. 경로 계획 및 충돌 회피
다수의 드론이 함께 비행하면서 서로의 경로를 피하고, 정해진 대형을 유지하며 목적지에 도달해야 해요.
비행 중 바람, 장애물, 통신 오류 등 예상치 못한 외부 요인이 생기면 즉시 대응해야 하고, 군집 전체가 유연하게 반응해야 합니다.
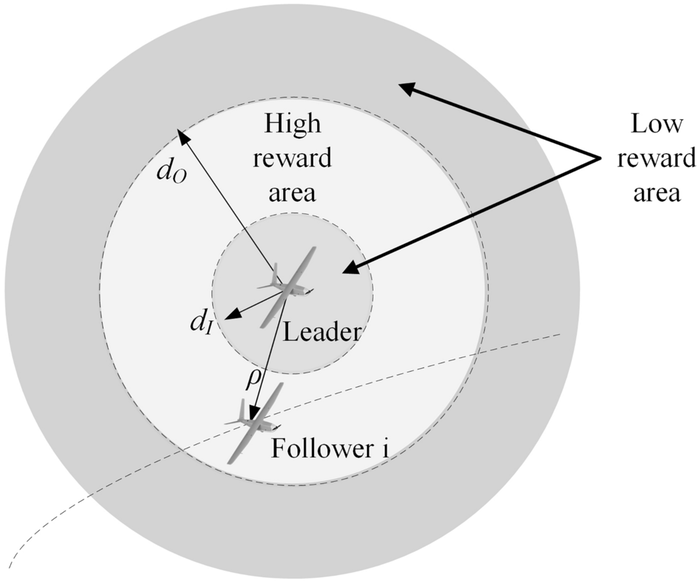
이와 관련해 “형태 유지” 방식, “리더 팔로워 방식”, “완전 분산 방식” 등 다양한 방법이 연구되고 있어요.
4. 확장성 및 신뢰성
드론 수가 많아질수록 제어 복잡도도 커지고 한 대의 실패가 전체에 미치는 영향도 커져요.
예컨대 수백 대에서 수천 대로 규모를 키우면 단순히 드론 하나 추가하는 것보다 제어·통신·배터리·안전성에 훨씬 더 많은 문제가 생깁니다.
최신 연구에서는 “확장성과 신뢰성”이 여전히 큰 난제라고 지적돼요.
5. 외부 환경·법적·안전 문제
드론이 비행하는 공간이 복잡하면(도시, 산악, 나무 위 등) 환경 인식이 어려워지고 예측 불가능성이 올라가요.
또한 비행 중 사고 발생 시 안전 책임이 누구에게 있는지 불분명하고, 항공법 규제도 아직 완전히 정비되지 않은 경우가 많아요.
기술적으로만 보면 가능해 보여도 실제 상업적·사회적 활용까지 연결하려면 이런 법·제도·윤리적 문제가 같이 풀려야 해요.

미래를 바꾸는 기술
군집 드론 기술은 화려한 퍼포먼스만큼이나 기술적·운용적 난관이 많습니다. 하지만 이런 난관을 극복하면, 우리의 삶을 크게 바꿀 잠재력이 있죠.
▲재난 구호: 산불 지역에서 수백 대의 드론이 동시에 수색하면서 생존자를 찾을 수 있어요. 단일 드론으로는 시간도 많이 걸리고 위험도 크죠.
▲농업·환경: 다수의 드론이 넓은 농지를 날아다니면서 병해충 탐지하거나 잡초 제거하는 데 활용 가능성이 있어요.
▲군사·물류: 여러 대의 드론이 협력해서 수송하거나 정찰하고, 심지어 자율적으로 임무를 바꾸는 모습도 연구되고 있어요.
최성훈 기자 csh87@etnews.com