







소금쟁이과 곤충인 라고벨리아(Rhagovelia)가 수면 위에서 자유롭게 움직일 수 있게 해주는 다리의 구조와 운동 메커니즘을 한국과 미국 공동 연구진이 밝혀냈어요.
이 원리를 이용해 초소형 수상 로봇 '라고봇(Rhagobot)'도 개발했어요.
아주대 고제성 교수·김동진 박사팀과 미국 버클리 캘리포니아대(UC 버클리)·조지아공대 공동 연구팀은 22일 라고벨리아의 다리 끝 부채꼴 구조가 물과 만날 때 순식간에 펼쳐지면서 추진력을 만들어 내는 원리를 밝혀내고, 이를 초소형 로봇에 적용해 어떻게 작동하는지도 확인했다고 밝혔어요.
이 연구를 통해 수생 마이크로 로봇, 환경 모니터링, 수질 탐사, 재난 현장 수색 등 소형 수상 로봇 플랫폼에 활용될 수 있다고 연구팀은 설명했어요.

라고벨리아는 다리 끝에 있는 부채꼴 구조를 순간적으로 펼쳐 빠른 물살에서도 민첩하게 움직일 수 있는 추진력을 만드는데, 이런 구조가 어떤 원리로 짧은 순간에 작동하는지는 그동안 밝혀지지 않았어요.
연구 결과 이 부채꼴 구조는 근육으로 움직이는 게 아닌 것으로 드러났어요.
라고벨리아 다리 끝에 있는 리본처럼 생긴 부채꼴 구조는 얇고 잘 휘는 성질을 가지고 있는데요.
이 구조는 물의 표면장력(물 위에서 잡아당기는 힘)과 자체 탄성(스스로 원래 모양으로 돌아가려는 성질)으로 인해 매우 빠르게 모양이 변해요.
이 때문에 물속에서는 0.01초 만에 쫙 펼쳐지고, 물 밖으로 나오면 바로 오므라드는 '초고속 자가 변형 구조'인 것으로 밝혀졌어요.
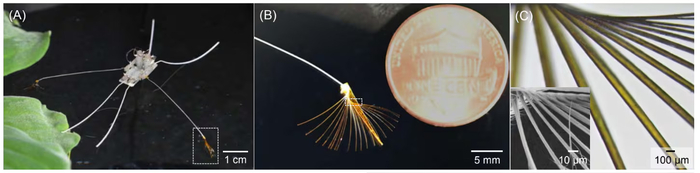
연구팀은 인공 털 21개로 부채꼴 구조를 만들고, 곤충 크기 로봇인 라고봇에 적용했어요.
부채꼴 구조가 실제 라고벨리아 다리처럼 움직이면서, 물속에서 강한 추진력은 물론 민첩한 방향 전환까지 가능하게 한다는 사실을 확인했답니다.
총무게가 0.23그램인 라고봇은 다리 끝에 1밀리그램짜리 폴리이미드 끈 21개로 이루어진 부채꼴 구조와 형상기억합금으로 만들어진 17밀리그램 인공 근육 구동기를 가지고 있어요. 덕분에 1초에 206도를 회전하고 몸길이의 두 배만큼 이동할 수 있어요.
이 연구는 과학저널 사이언스(Science) 표지논문으로 게재됐답니다.
최성훈 기자 csh87@etnews.com