






영국 크랜필드대학교 연구팀이 3D 프린팅을 활용해 만든 로봇이에요.
지난해 10월 소개했던 핫픽 글 '바람 타고 움직이는 화성 탐사 로버'에서처럼 이 로봇도 바람 에너지로 움직이죠.
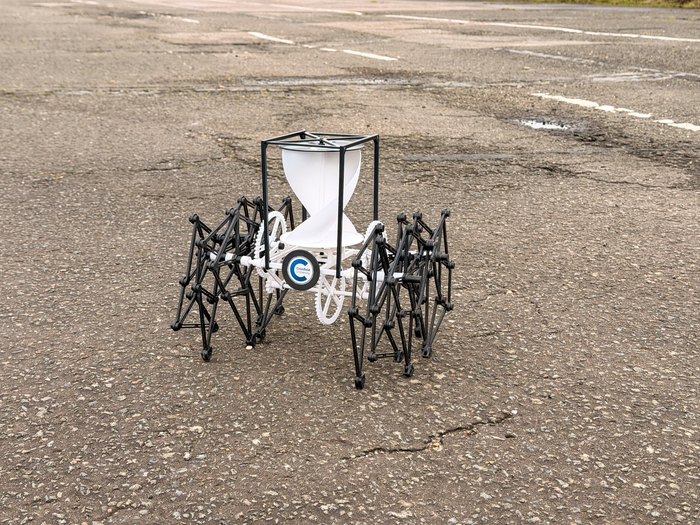
배터리가 없어도 되고 만드는 데 비용도 별로 들지 않는 이 로봇의 이름은 '완더봇(WANDER-bot)'.
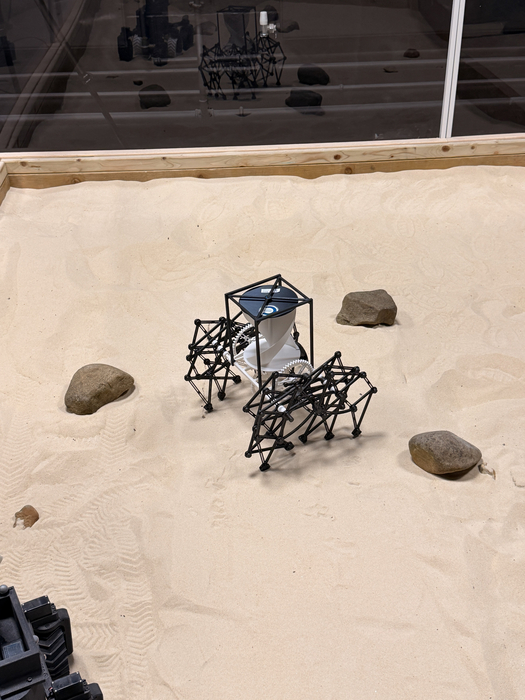
완더봇은 사막이나 극지방, 심지어 행성과 같이 사람이 접근하기 어려운 환경에서도 오래 활동할 수 있게 만들어졌어요.
기존 탐사 로봇들은 배터리와 전자 장치 의존도가 높아 장기간 운용이 어렵고, 특히 극한 환경에서는 유지보수가 큰 문제였어요.
완더봇은 이러한 한계를 극복하기 위해 개발된 로봇이에요.
이 로봇은 배터리를 쓰지 않고 바람만으로 다리를 움직여, 장기 탐사나 미지 지형 지도화에 필요한 전력을 아낄 수 있어요.
배터리와 충전 문제 때문에 며칠 이상 연속 운용이 어려웠던 기존 탐사 로봇과 달리, 완더봇은 연속적인 바람을 활용해 거의 제한 없이 움직일 수 있답니다.
카메라나 센서 같은 부가 장치가 필요할 때만 작은 전원으로 충분히 구동할 수 있죠.
또한 태양광 패널이나 방사성 열전 발전기처럼 시간이 지나면서 성능이 떨어지는 문제도 피할 수 있어, 보다 안정적으로 오래 사용할 수 있답니다.
게다가 완더봇은 100% 3D 프린팅 구조로 제작돼 현장에서도 쉽게 수리하고 부품을 교체할 수 있어요.
연구팀은 이를 “현장에서 바로 조립하고 수리할 수 있는 자급자족형 로봇”이라고 설명해요.
실제로 우주 탐사처럼 인간이 직접 수리하기 어려운 환경에서도, 필요한 부품을 현장에서 바로 출력하고 교체할 수 있어 비용과 시간을 크게 줄일 수 있죠.

완더봇의 독특한 움직임은 네덜란드 예술가 테오 얀센(Theo Jansen)의 스트랜드비스트(Strandbeesten)에서 영감을 받았어요.
스트랜드비스트는 바람의 힘으로 움직이는 대형 기계 작품으로, 얀센 작가가 PVC, 플라스틱, 줄 같은 재료로 바람과 환경을 이용해 이동하도록 설계했죠.
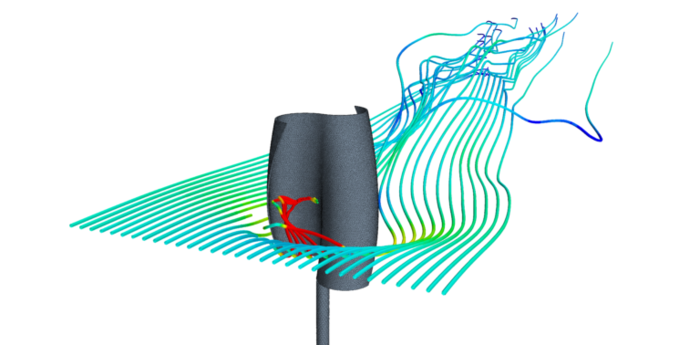
완더봇은 이 얀센의 기계적 설계 원리와 '사보니스(Savonius) 터빈'을 결합했는데, 바람이 터빈을 돌리면 기계 장치가 다리를 움직여 로봇을 전진시키는 구조랍니다.
복잡한 전자 장치 없이도 움직일 수 있어 유지보수가 어려운 극한 환경에서도 작동을 멈추지 않아요.
개발을 이끈 사우라브 우파드야이(Saurabh Upadhyay) 박사는 “배터리 용량과 기술적 복잡성은 로봇 탐사의 한계가 되곤 한다. 완더봇은 저비용, 수리 가능, 자급자족형 로봇의 첫 단계로, 현재 인간이 접근하기 어려운 행성이나 지구의 극한 지역에서도 활용할 수 있는 잠재력을 보여준다”고 말했어요.
현재 이 로봇은 기술 준비 수준(TRL)이 낮은 시제품 단계이지만, 유럽우주기구(ESA) ASTRA 컨퍼런스 2025에서 배터리 없이 바람으로 이동하는 가능성을 입증하는 프로토타입으로 주목을 받았어요.
앞으로 연구팀은 조향 기능과 기동성을 강화해 극지방의 얼음 지형이나 사막의 모래 언덕 등 더 복잡한 환경에서도 탐사가 가능하도록 개선할 계획이에요.
이 기술은 장기 탐사뿐 아니라, 극한 환경에서 자급자족형 기계 시스템 설계와 우주 탐사 기술 연구에도 큰 영향을 미칠 것으로 기대돼요.
이처럼 바람을 활용한 탐사 로봇 연구는 완더봇뿐만 아니라 다른 국제 연구팀에게서도 활발히 진행되고 있어요.
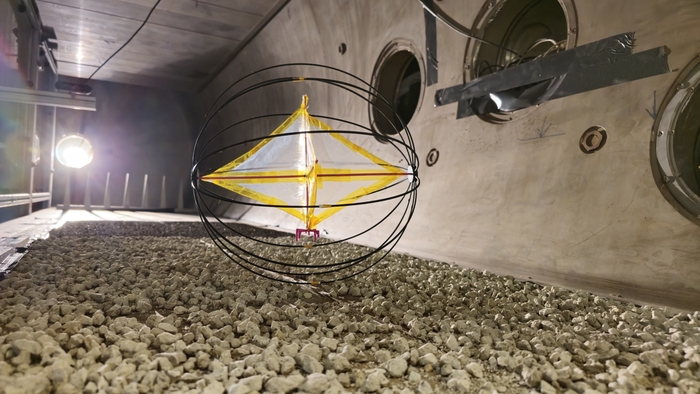
젊은 과학자들로 구성된 국제 연구팀 '팀 텀블위드(Team Tumbleweed)'는 바람에 날리는 텀블위드 식물처럼 공 모양 로버를 개발 중이에요.
이 로버는 바람을 타고 이동하면서 스스로 데이터를 수집할 수 있도록 설계됐어요.
풍동 실험과 야외 지형 테스트를 통해 로버의 이동성과 데이터 수집 능력을 검증했죠.
실험 결과, 바람의 힘만으로 경사진 지형도 오를 수 있었고, 내부 센서로 온도, 압력, 진동 등 다양한 환경 데이터를 안정적으로 수집할 수 있다는 사실이 확인됐어요.
여러 대의 로버가 한꺼번에 흩어져 데이터를 모으는 '스웜(Swarm, 무리) 탐사' 방식까지 계획하고 있어, 완더봇과 같은 자급자족형 로봇 설계가 차세대 탐사 방식으로 활용될 가능성을 보여주고 있답니다.
최성훈 기자 csh87@etnews.com